 咨詢郵箱:
咨詢郵箱: 咨詢熱線:
咨詢熱線:

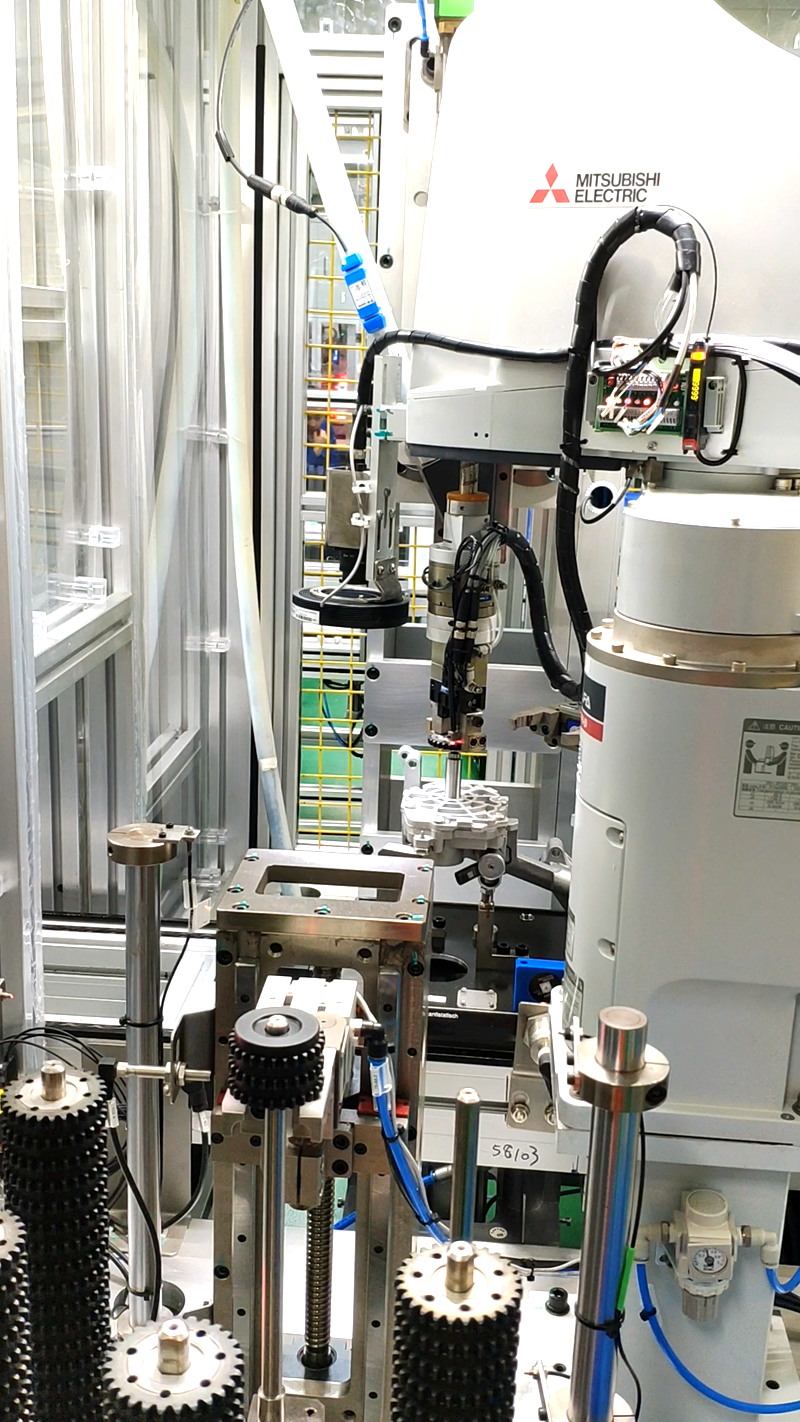
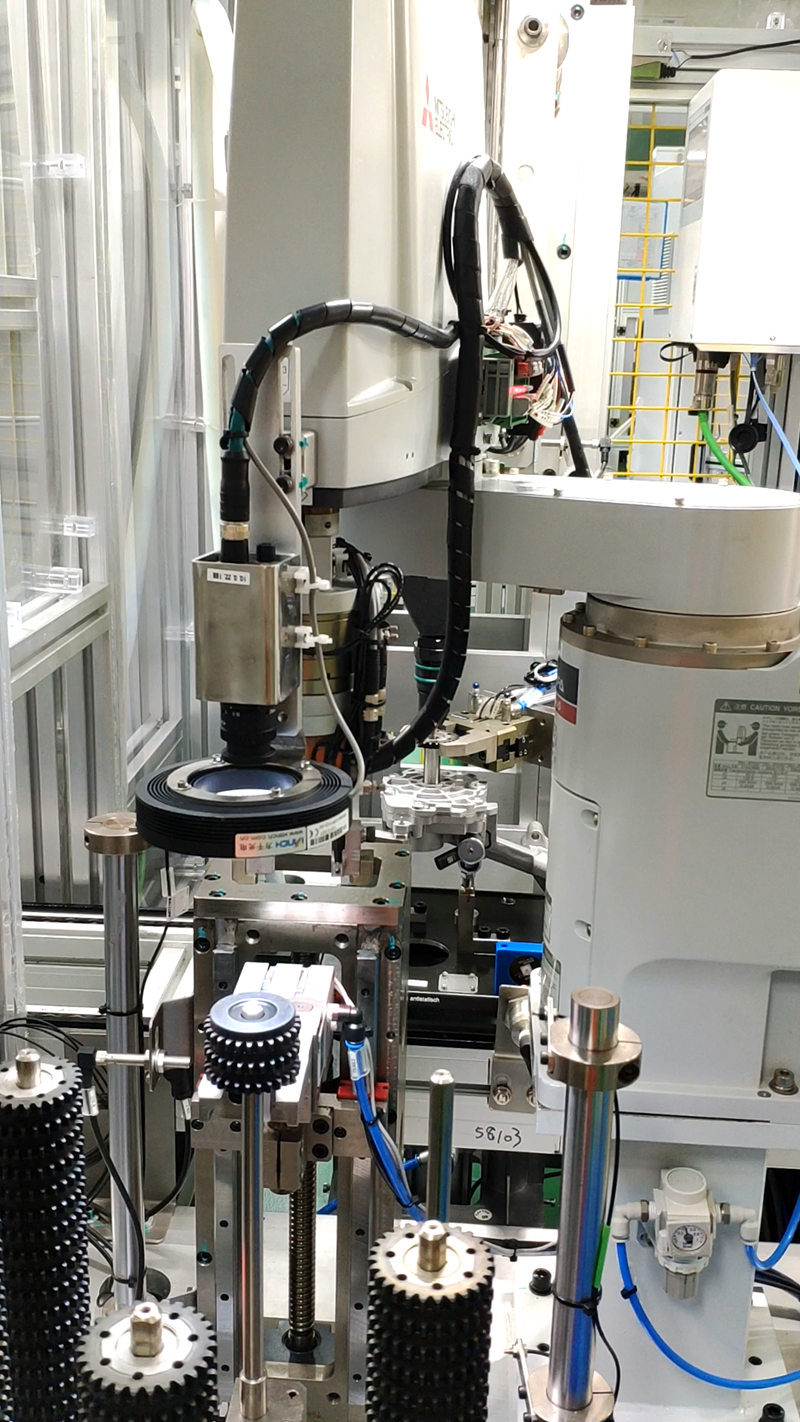
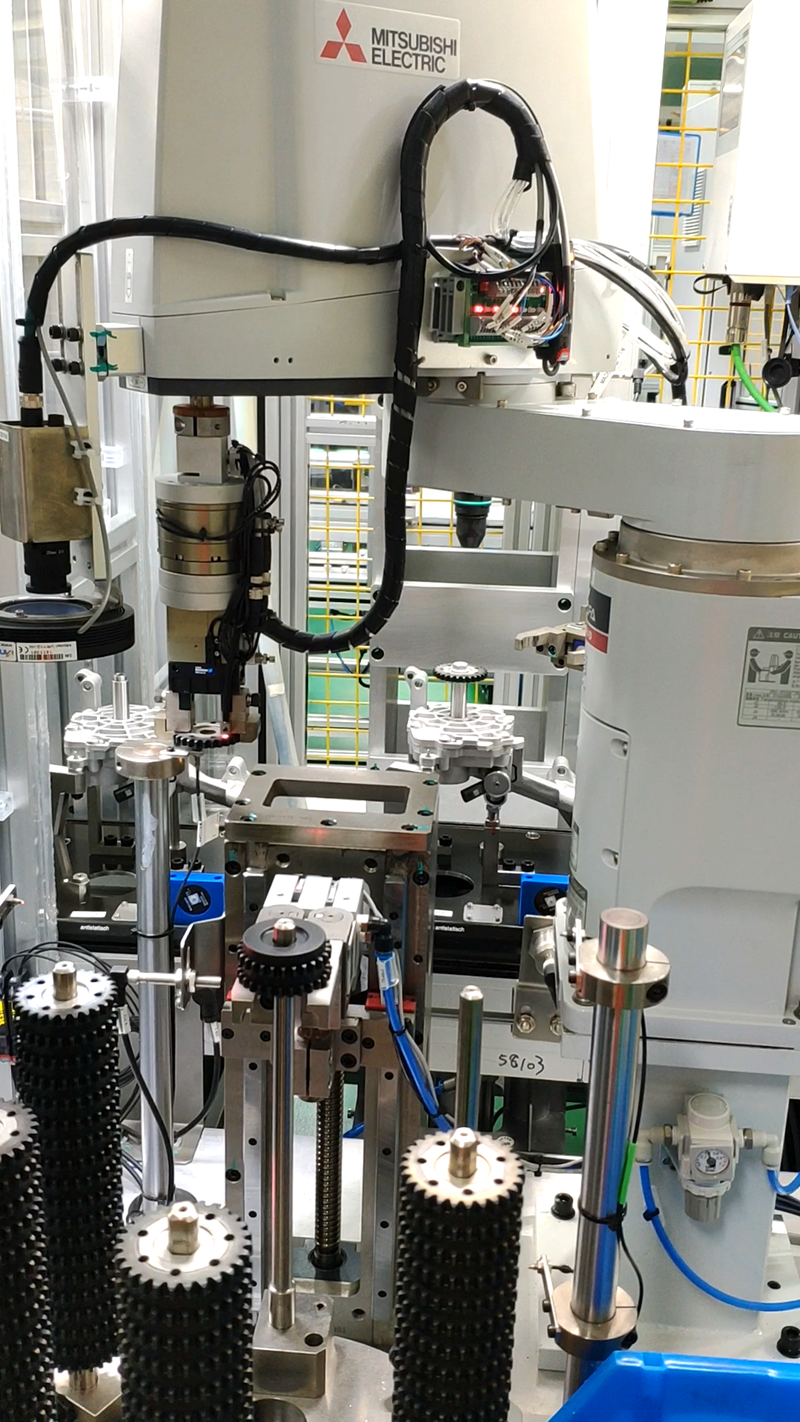
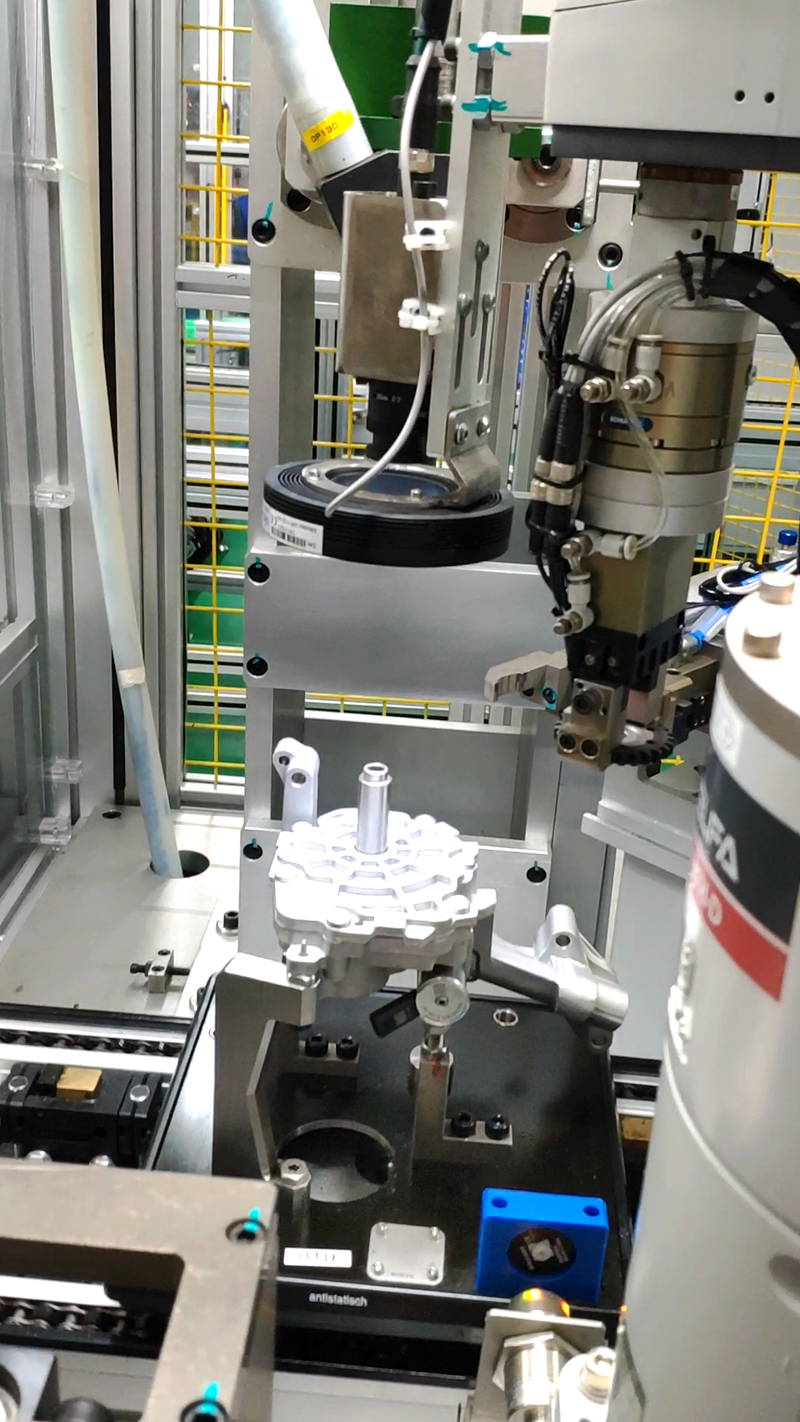
機器人通過視覺引導自動裝配鏈輪
發表日期:2019-05-23 13:35?? 文章編輯:admin ?? 瀏覽次數:
通過工業相機視覺引導,查找和計算鏈輪缺口位置,完成抓取引導。再通過視覺檢查和計算出轉子缺口位置,機器人對位置進行計算后完成鏈輪和轉子軸缺口的對位,完成高精度裝配,鏈輪和轉子軸配合公差小于2絲(0.02mm),角度誤差±0.5度以內。

標簽:鏈輪裝配,機器人裝鏈輪,齒輪裝配,機器人視覺 ? ?
如沒特殊注明,文章均為極可原創,轉載請注明來自http://www.97295.com.cn/cases/car/2019/0522/35.html